Engr Programmer
190 supporters
Anmelden
Anmelden
Engr Programmer
Shop
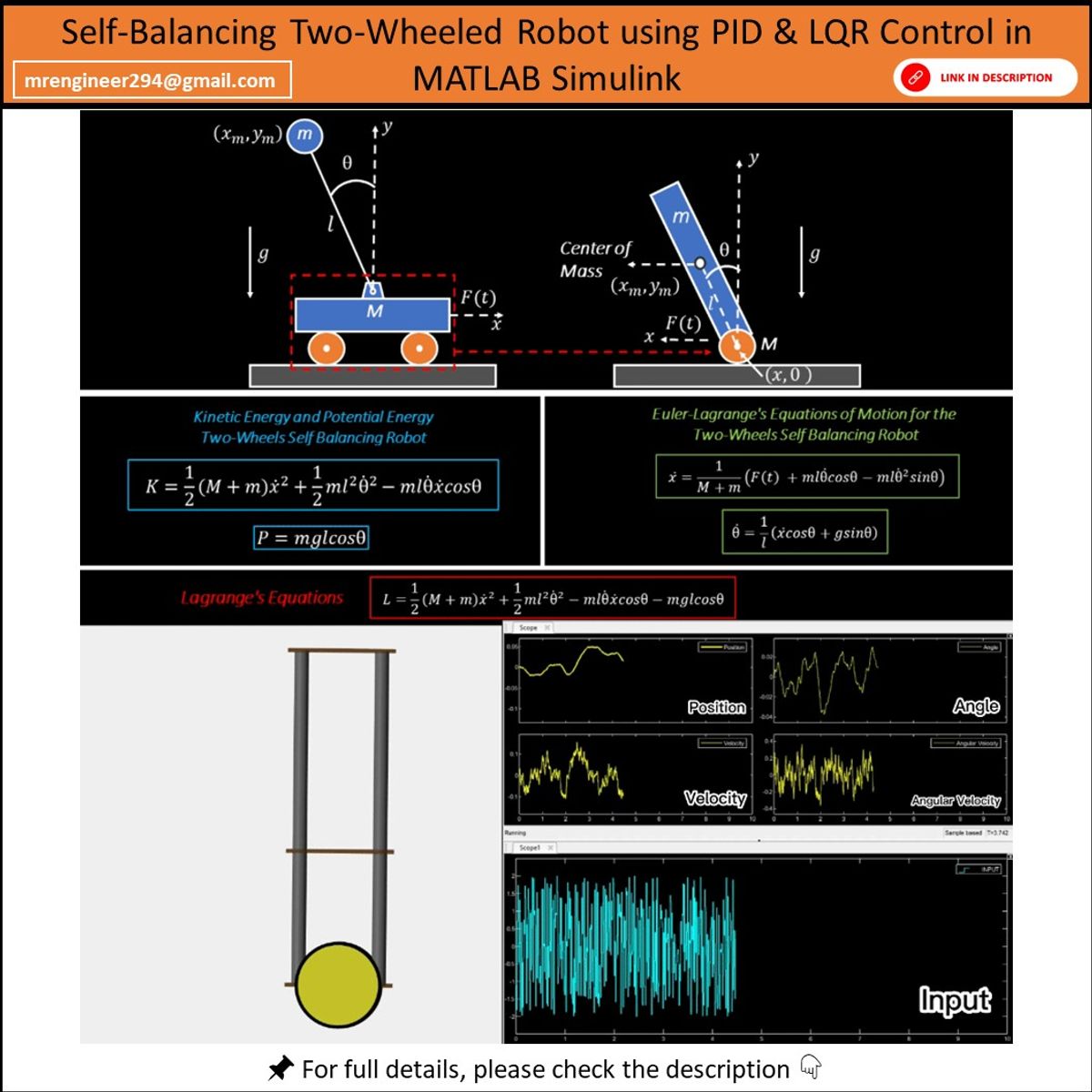
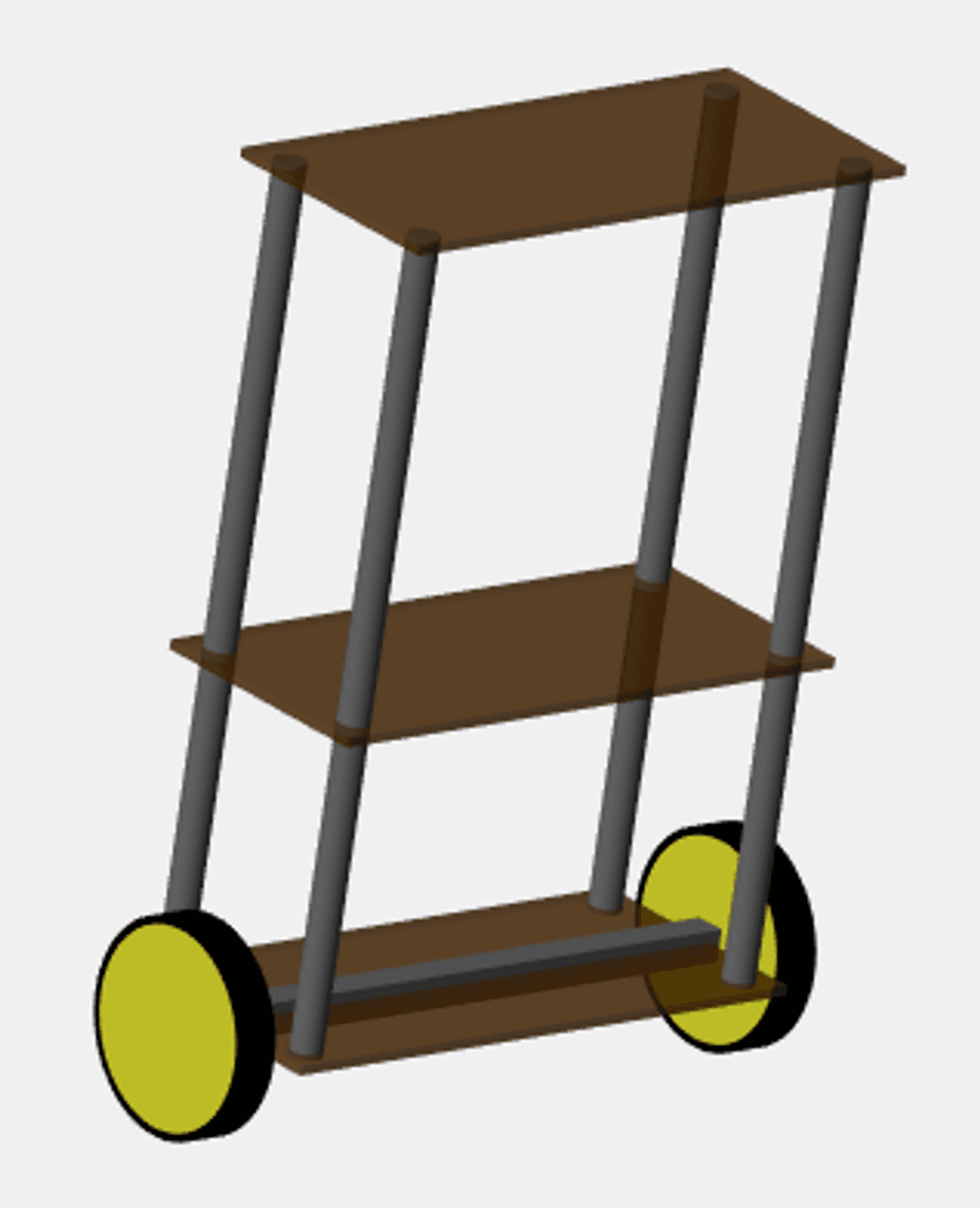
🤖 Dynamic Modeling & Simulation of a Self-Balancing Two-Wheeled Robot using Lagrangian Method, PID & LQR Control – MATLAB Simulink
$15
NaN
(
)
Bewertungen
NaN
()
5 Stern
0%
4 Stern
0%
3 Stern
0%
2 Stern
0%
1 Stern
0%
4 Personen haben dies gekauft
undefined
Teilen
$15
4 Personen haben dies gekauft
Gib einen fairen Preis ein
$
Bitte gib einen Betrag von $0 oder höher ein
In den Warenkorb legen
Teilen
$15
In den Warenkorb legen
Deutsch
English
Deutsch
Español
Italiano
Français
Українська
$
USD
United States Dollar
$
British Pound Sterling
£
Euro
€
Australian Dollar
AU$
Brazilian Real
R$
Canadian Dollar
CA$
Czech Koruna
CZK
Danish Krone
DKK
Hong Kong Dollar
HK$
Hungarian Forint
HUF
Indian Rupee
₹
Mexican Peso
MX$
Norwegian Krone
NOK
New Zealand Dollar
NZ$
Polish Złoty
PLN
Singapore Dollar
S$
Swedish Krona
SEK
Datenschutz
Nutzungsbedingungen
Melden
Starte deine „Kauf mir einen Kaffee“-Seite